problem19
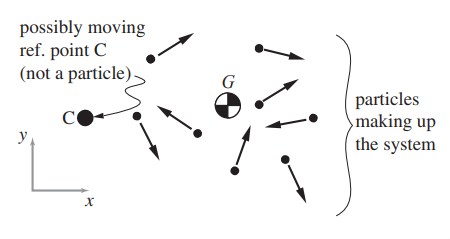
You should master problem 14 before looking at this problem. Consider a system of moving particles with moving center of mass at G. Consider also a moving point C (moving relative to a Newtonian frame \(\mathcal{F}\) that has an origin 0). For which of these definitions of \(\vec{H}_{/C}\) Is the following equation of motion true (that is, consistent with \(\vec{F} = m\vec{a}\))?
\[\vec{M}_C = \dot{\vec{H}}_{/C}\]
In each case say whether the definition works i) in general, or ii) for some special cases (that you name) concerning the motions of P and C.
- \(\vec{H}_{/C} = \sum \vec{r}_{i/C'} \times \vec{v}_{i/C'} m_i\), where C’ is a point fixed in \(\mathcal{F}\) that instantaneously coincides with C. (Hint: this definition is good one, always!)
- \(\vec{H}_{/C} = \sum \vec{r}_{i/C} \times \vec{v}_{i/0} m_i\). (This strange definition is used in the classic, but in this case odd, Dynamics book by Housner and Hudson.)
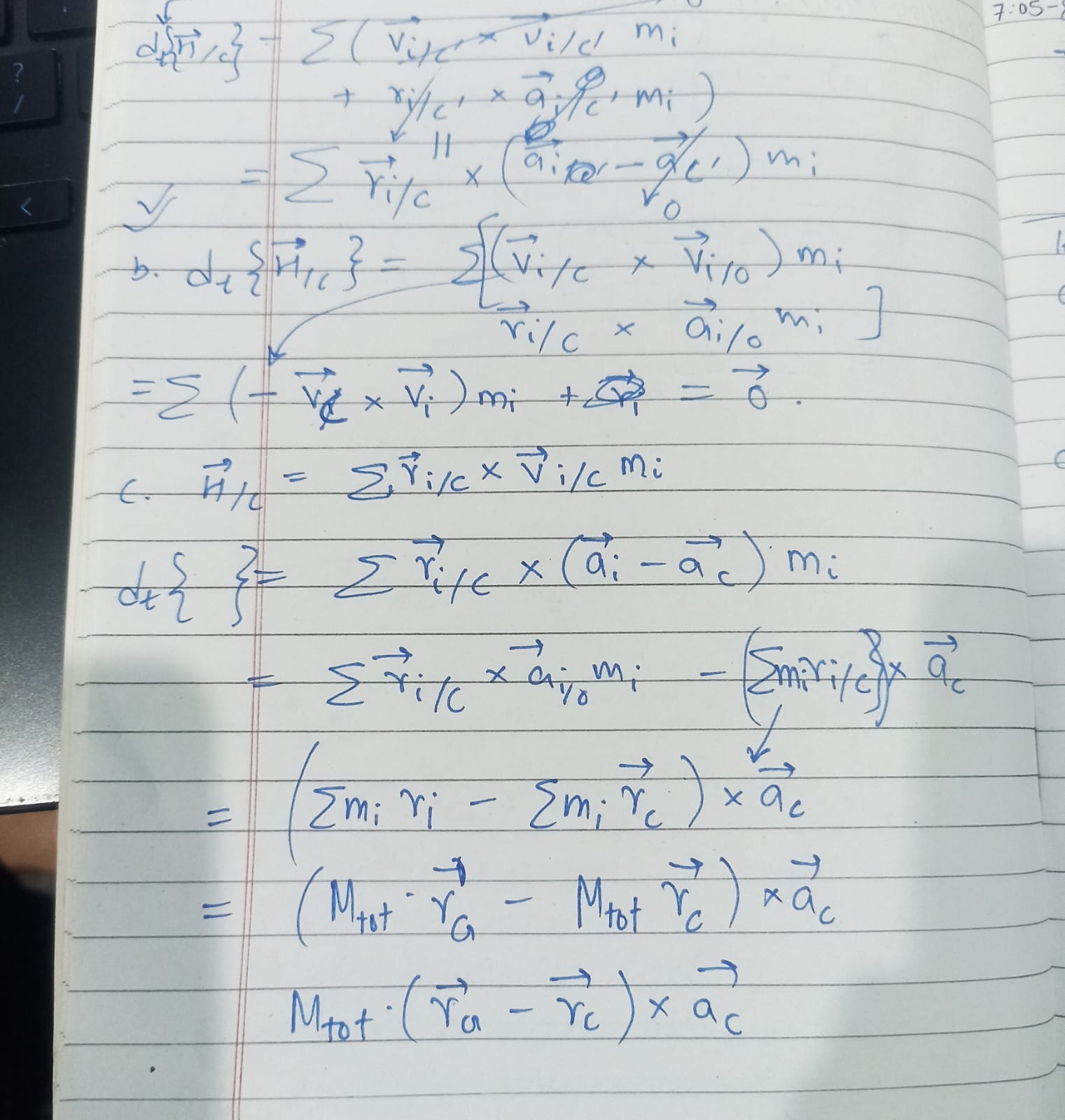
- \(\vec{H}_{/C} = \sum \vec{r}_{i/C} \times \vec{v}_{i/C} m_i\). (Hint: this is the most important candidate definition, but it’s only good for special kinds of C, namely: C = COM, C is fixed and …?)
That is, for each possible definition of \(\vec{H}/C\) you need to calculate \(\dot{\vec{H}}_{/C}\) by differentiation and see if and when you get \(\sum \vec{r}_{i/C} \times \vec{a}_{i/0} m_i\). If you are short for time just consider cases (a) and (c) and note their agreement if C is stationary or if C=G. Students in 5730 are expected to do a competent clear job of all three parts.
1 \(\vec{H}_{/C} = \sum \vec{r}_{i/C'} \times \vec{v}_{i/C'} m_i\), where C’ is a point fixed in \(\mathcal{F}\) that instantaneously coincides with C. (Hint: this definition is good one, always!)
No conditions, this definition of \(\vec{H}_{/C}\) is consistent with \(\vec{F} = m\vec{a}\).
2 \(\vec{H}_{/C} = \sum \vec{r}_{i/C} \times \vec{v}_{i/0} m_i\). (This strange definition is used in the classic, but in this case odd, Dynamics book by Housner and Hudson.)
This definition of \(\vec{H}_{/C}\) is not consistent with \(\vec{F} = m\vec{a}\), unless \(\sum \vec{v}_C \times \vec{v}_{i/0} m_i = \vec{0}\), i.e C is moving perpendicular to every point in the rigid body. If C=G, then this definition becomes consistent, as no relative radial velocity.
3 \(\vec{H}_{/C} = \sum \vec{r}_{i/C} \times \vec{v}_{i/C} m_i\). (Hint: this is the most important candidate definition, but it’s only good for special kinds of C, namely: C = COM, C is fixed and …?)
This definition of \(\vec{H}_{/C}\) is not consistent with \(\vec{F} = m\vec{a}\), unless \((\vec{r}_G - \vec{r}_C) \times \vec{a}_{i/0} M_tot = \vec{0}\), i.e C is moving accelerating perpendicular to direction connecting C and G. If C=G, then this definition becomes consistent.