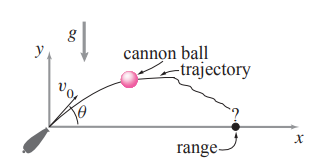
A cannon ball \(m\) is launched at angle \(\theta\) and speed \(v_0\). It is acted on by gravity \(g\) and a quadratic drag with magnitude \(\|cv^2\|\).
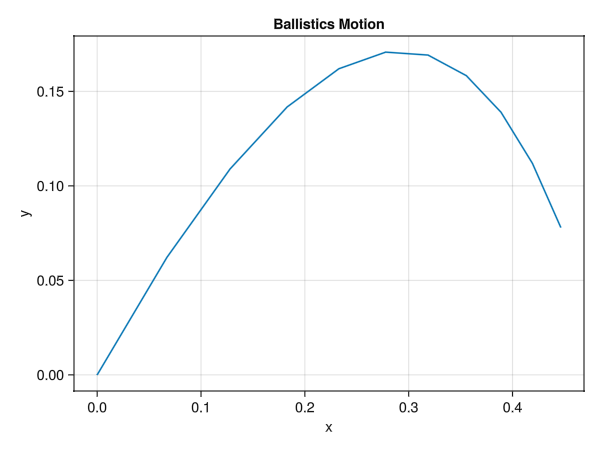
Find a numerical solution using \(\theta = \pi/4\), \(v_0 = 1\) m/s, \(g = 1\) m/s\(^2\), \(m = 1\) kg.
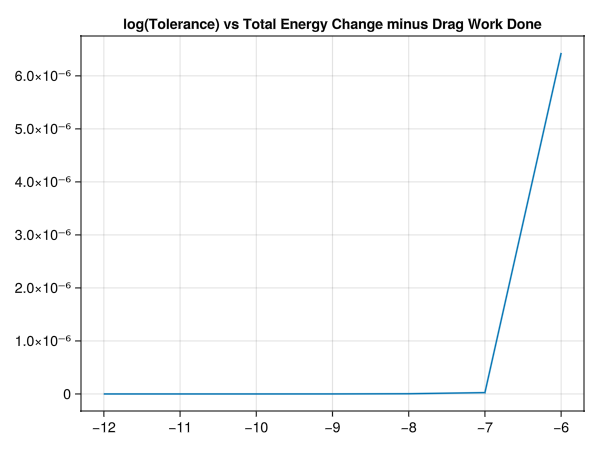
Numerically calculate (by integrating \(\dot{W} = P\) along with the state variables) the work done by the drag force. Compare this with the change of the total energy. Make a plot showing that the difference between the two goes to zero as the integration gets more and more accurate.
../../media/problem12/problem12-ballistic.png
Figure 1: External Forces on System
1 Find a numerical solution using \(\theta = \pi/4\), \(v_0 = 1\) m/s, \(g = 1\) m/s\(^2\), \(m = 1\) kg.
2 Numerically calculate (by integrating \(\dot{W} = P\) along with the state variables) the work done by the drag force. Compare this with the change of the total energy. Make a plot showing that the difference between the two goes to zero as the integration gets more and more accurate.
I take this oppurtunity to implement the ‘slither’ for trajectory similarity, that was introduced